Deep-sea inhabitants inspire scientists, constantly revealing to them an understanding of how life development in the ocean and AI Robots help in research.
But thick, bulging and slippery creatures are pretty hard to learn because they are trying to elude anyone who is trying to inspect them. Scientists Started from Website Development in Batumi.
So it was before. In a new article published in the Science Robotics magazine about new technologies and robotics, mechanical materials engineer Nina Sinatra of Harvard University and her colleagues developed a new research robot with sufficiently soft, finger-like tentacles to catch slippery sea creatures without causing harm them.

“We really wanted to think of it as a gentle embrace of an animal,” Sinatra says in Popular Mechanics magazine. “Jellyfish is a complex creature to interact with, so for us, for engineers, it was an interesting design task.”
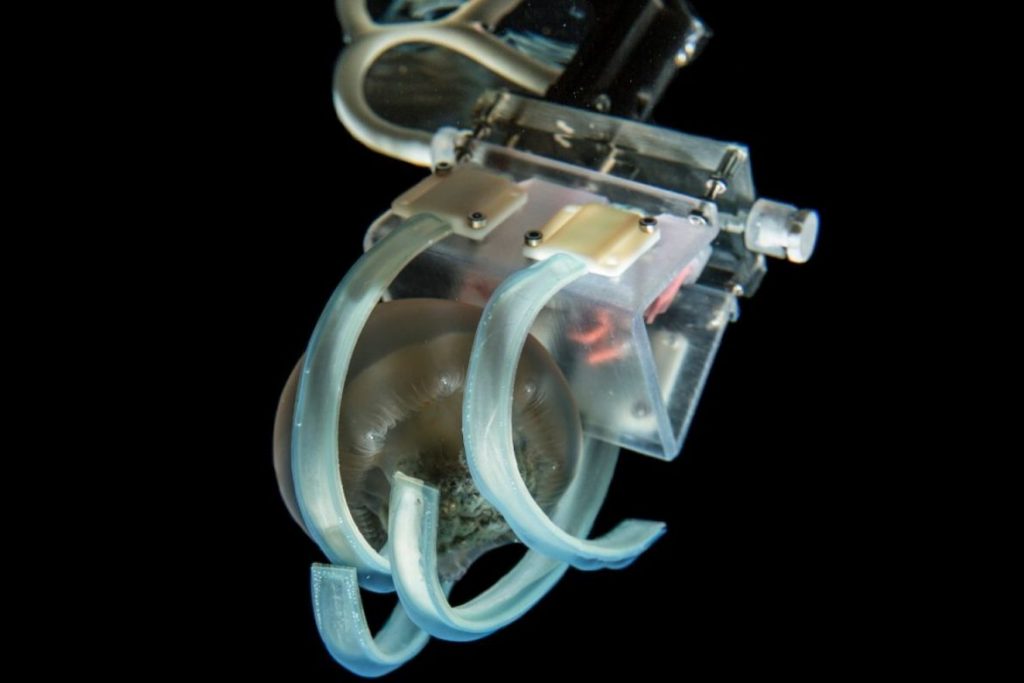
Sinatra’s robot has six finger-shaped processes that stretch and delicately compress around the object. The air channel inside each finger can be under pressure, causing them to bend inward, and the soft outer silicone coating of each finger is enveloped by a mesh of nanofibers that help guide their movements.
Sinatra and her colleagues first practiced using the device on artificial jellyfish in their laboratory. To evaluate the success of the bot, the researchers wanted to see if the fingers could withstand the forces of wriggling animals. Speed was also an important factor: if the hands closed too quickly, they could pierce the jellyfish, but if they closed too slowly, it could slip out and swim away.
The team also tracked the durability of the bot. Sinatra says he was able to complete 100 grabs before his fingers worn out.
Then the scientists went to the New England Aquarium in Boston to test the four-fingered version of the device on three common types of jellyfish: eared aurelia, blue fat jellyfish and golden jellyfish. But all three of the above subjects easily slipped away from the device with four “fingers,” so the scientists added two extra fingers at the top and bottom of the palm to provide a stronger grip.
To protect the animals during capture, the robot needs to apply the necessary amount of pressure. Sinatra says that contact pressure (a force created by two objects repelling each other) of 1 kilopascal (kPa) or more can potentially crush a fragile jelly body. During testing, the robot worked with an average contact pressure of approximately 0.05 kPa, which is well below the limit of 1 kPa.

Modern methods include cleaning soft animals using nets that can entangle animals, or even kill them. In 2018, Sinatra was part of a team of researchers from the University of Rhode Island, Baruch College and Harvard University, who discovered a strange device designed to capture “without touch”. Unfortunately, as the container approached the animals, it periodically clamped their tentacles.
Kakani Katia, chief engineer at the Monterey Bay Aquarium Research Institute, tells Popular Mechanics that “collecting deep-sea creatures is an unnatural process,” so it’s unclear how effective such devices are in protecting animals from “collection stress”. But “it will be interesting to see how it (collection technology) is used and changed with further development,” she says.

Sinatra has high hopes for its bot. He has the lowest pressure compared to any robotic capture, and she believes that this can help identify and select new types of jellyfish that are too fragile to be caught using modern methods. In the future, these technologies may be modified, which means they will become useful in scientific research. Today, this bot is ideal for catching any deep-sea creature that scientists are trying to study.


